最終更新日 2019年10月28日
概要
Docker Engine 1.12 RC1 から、Docker Engine に swarm モードが搭載されています。また、機能として Ingress オーバレイ・ネットワークが標準で利用でき、負荷分散機能も使えます。このトピックでは新しい用語や概念の整理をし、実際のクラスタを作成と、nginx サービスとしてのコンテナを実行するまでの手順を整理します。
「swarm」 は「クラスタ」の意味
Docker Engine に swarm モードは、従来の Docker Engine のクラスタを管理する Docker Swarm
が Docker Engine に機能統合されたものです。これまで Docker Engine のクラスタを作るためには、 Swarm コンテナ か swarm バイナリをセットアップする必要がありました。ですが、今後は SwarmKit という内蔵機能に統合されているため、追加セットアップなしに docker コマンドでクラスタを管理できます。
そして、Docker Engine でこのバージョンから Docker Engine のクラスタを swarm と呼びます。swarm は「群れ」の意味があります。そして swarm クラスタを扱うには、Docker Engine の swarm モード(swarm mode) を利用します。
Docker 1.12 RC をセットアップ
現時点で swarm モードを使えるのは RC (リリース候補)版のみです。そのため、通常のセットアップ方法とは異なります。バイナリは GitHub の releases から入手できます。あるいは、次のコマンドを実行し、自動的に RC 版をセットアップすることもできます( Ubuntu 14.04, 16.04, CentOS 7.2 で動作確認)。
$ curl -fsSL https://test.docker.com/ | sh CentOS 7.2 では Docker Engine が自動起動しないため、 systemctl で起動する必要があります。
# systemctl start docker 起動後の動作確認は、 docker version コマンドを実行します。正常に動作していれば、クライアントとサーバの両方のバージョンを表示できます。
# docker version
Client:
Version: 1.12.0-rc2
API version: 1.24
Go version: go1.6.2
Git commit: 906eacd-unsupported
Built: Fri Jun 17 21:21:56 2016
OS/Arch: linux/amd64
Server:
Version: 1.12.0-rc2
API version: 1.24
Go version: go1.6.2
Git commit: 906eacd-unsupported
Built: Fri Jun 17 21:21:56 2016
OS/Arch: linux/amd64ノード
ここでは3台の Docker Engine でクラスタを作成します。
node-01192.168.39.1 … マネージャ・ノード兼ワーカ・ノードnode-02192.168.39.2 … ワーカ・ノードnode-03192.168.39.3 … ワーカ・ノード
3台のサーバで Docker Engine ( dockerd デーモン )を動かします。このクラスタ内の Docker Engine を、それぞれ swarm の ノード(node) と呼びます。そして、このノードには2つの役割があります。
1つは マネージャ・ノード(manager node) であり、ここで サービス(service) の期待状態(desired state)を定義します。サービスとは「 nginx コンテナを3つ動作する」といった状態を指します。また、swarm クラスタ全体を管理する docker node <命令> コマンドを処理できるのもマネージャ・ノードです。
もう1つは ワーカ・ノード(worker node) です。マネージャ・ノードで定義されたサービスがこのワーカ・ノードに送られ、コンテナを実行・停止などの処理を行います。また、ワーカ・ノードは自分の状態をマネージャ・ノードに伝える役割もあります。
なお、デフォルトではマネージャ・ノードはワーカーノードの役割も兼ねます。オプションの設定で、マネージャのみの役割で動作させることもできます。
サービスとタスクについて
swarm クラスタ上で何らかのコンテナを実行するには、サービスを定義します。このサービス定義に従って実際にコンテナを起動するのが タスク(task) です。タスクはコンテナの最小スケジューリング単位です。スケジューリングとは、どのノードでどのコンテナを実行するのかを検討し、実際に起動する処理を指します。
そして、サービスには2種類あります。
- 複製サービス(replicated service) … マネージャが各ノードに対し、指定した数の複製タスクを作成します。
- グローバル・サービス(global service) … あるタスクをクラスタ内の全ノード上で実行します。
複製サービスが適しているのは、ウェブなどのスケールさせる必要があるタスクです。グローバル・サービスは全ノード上で実行しますので、監視やログ収集などのタスク実行に適していると考えられます。
swarm の初期化
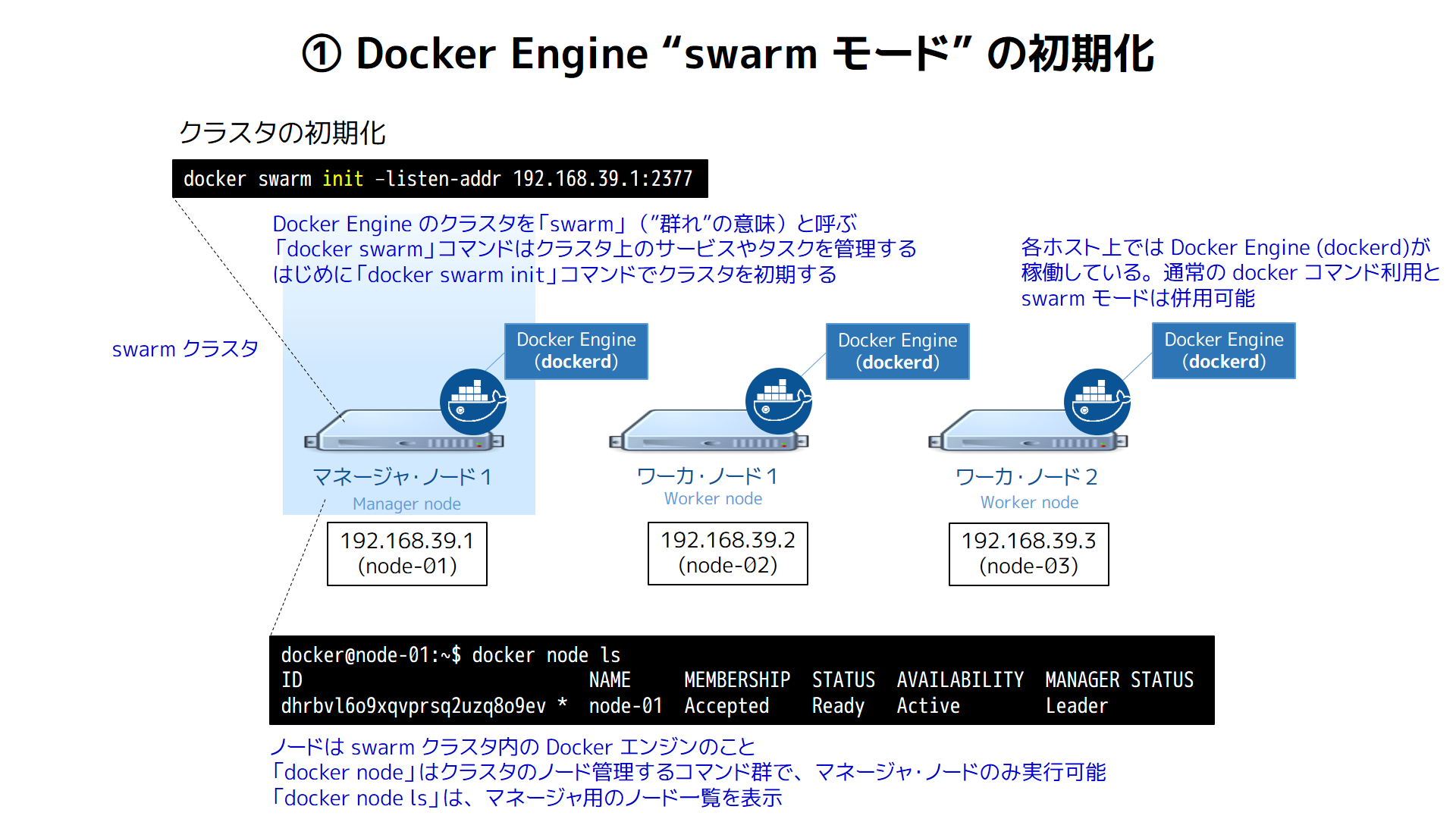
ここからは、実際にクラスタを構築します。swarm モードを使うためには、まず、swarm クラスタの初期化をします。初期化のためには docker swarm init コマンドを使います(init = initialize = 初期化)。 --lissten-addr <ホスト>:<ポート> で、swam マネージャが利用するインターフェースとポート番号を指定します。
$ docker swarm init --listen-addr 192.168.39.1:2377 swarm クラスタ上のノード一覧を確認するには docker node ls コマンドを使います。
$ docker node ls
ID NAME MEMBERSHIP STATUS AVAILABILITY MANAGER STATUS
dhrbvl6o9xqvprsq2uzq8o9ev * node-01 Accepted Ready Active Leader docker swarm init コマンドを実行した node-01 ノードの情報が表示されます。 MANAGER STATUS の部分に何らかの表示があれば、マネージャとして動作しています。ここでは初めて実行したマネージャのため、 Leader (リーダ)の役割です。
swarm クラスタに他のノードを追加
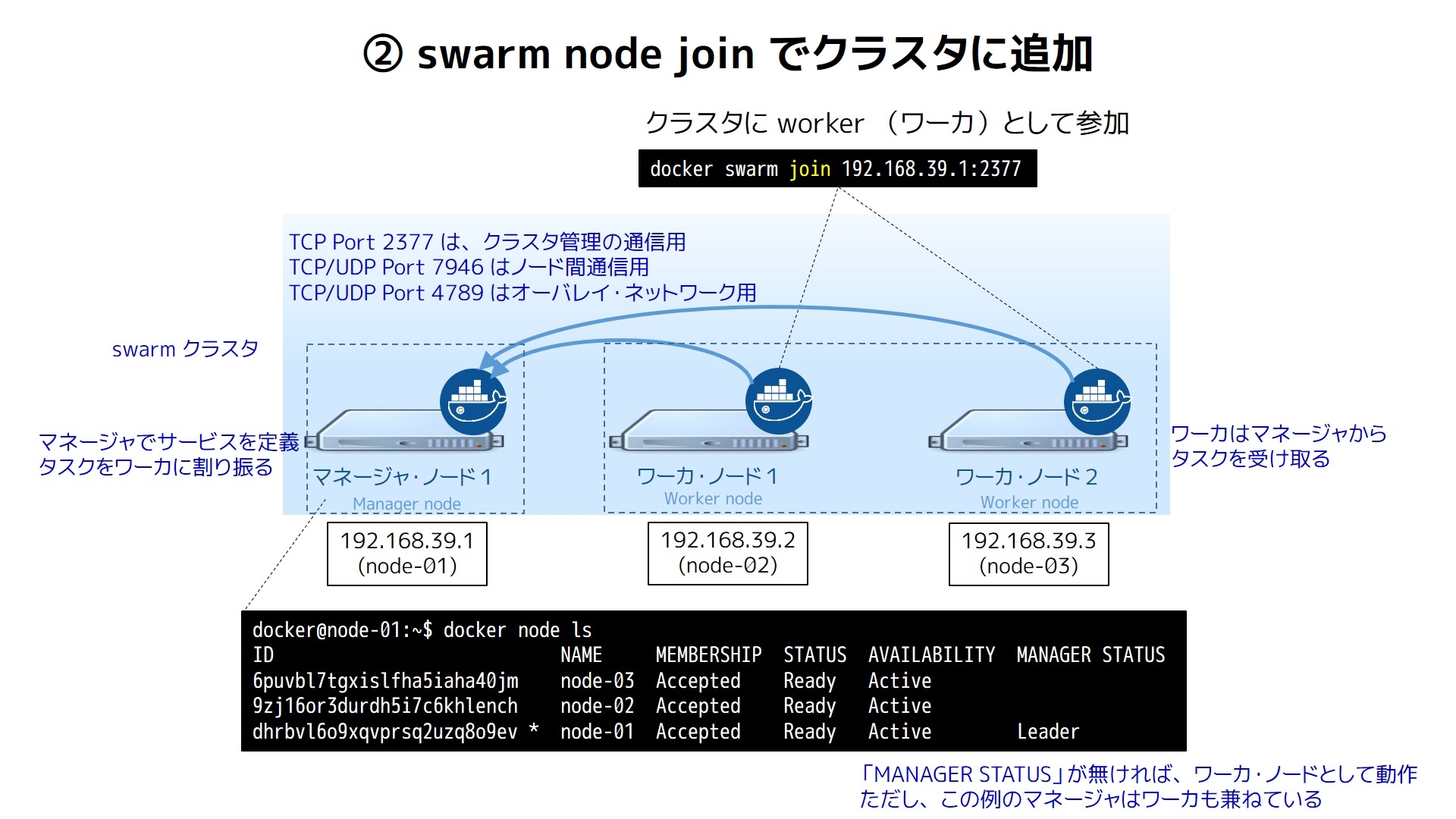
次は残りの2台をクラスタに追加します。クラスタに追加するには、 node-02 node-03 の各ノード上で docker swarm join <マネージャ> コマンドを実行します。ここでは、次のコマンドを実行します。
$ docker swarm join 192.168.39.1:2377 それから、 node-01 上で docker node ls コマンドを実行したら、各ノードが swarm に追加されているのが確認できます。
docker@node-01:~$ docker node ls
ID NAME MEMBERSHIP STATUS AVAILABILITY MANAGER STATUS
6puvbl7tgxislfha5iaha40jm node-03 Accepted Ready Active
9zj16or3durdh5i7c6khlench node-02 Accepted Ready Active
dhrbvl6o9xqvprsq2uzq8o9ev * node-01 Accepted Ready Active Leader この情報はとは別に、クラスタの情報は docker info でも確認できます。
$ docker info
(省略)
Swarm: active
NodeID: dhrbvl6o9xqvprsq2uzq8o9ev
IsManager: Yes
Managers: 1
Nodes: 3マネージャは1つ、ノードが3つあることが分かります。
これでサービスを実行する準備が整いました。
nginx サービスの定義と実行
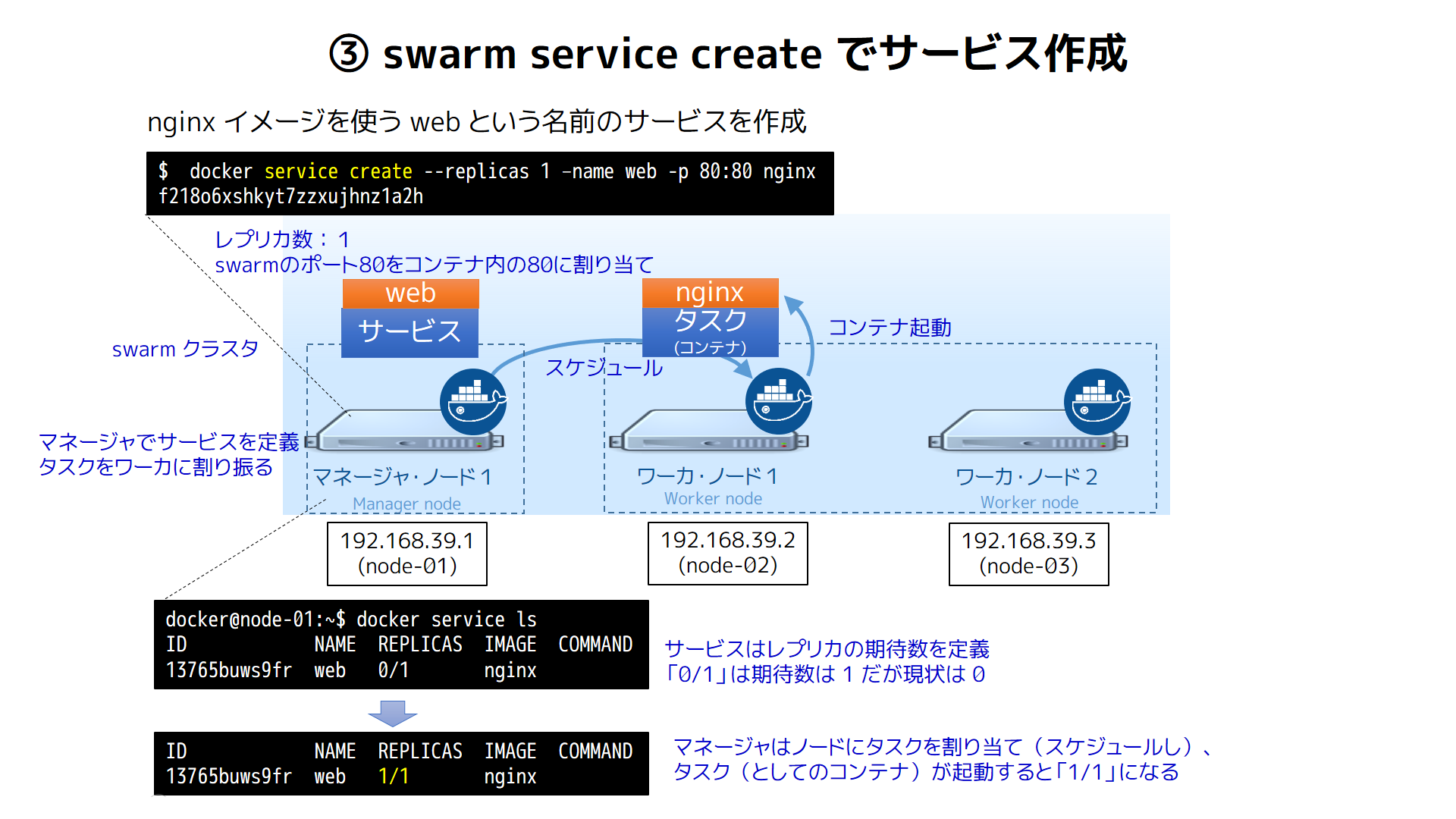
次は nginx コンテナを実行するサービスを定義します。サービスの定義は docker service create コマンドを使います。ここでは web という名前のサービスで(--name web )、コンテナを1つ実行( --replicas 1 )します。また、サービス側のポート 80 をコンテナ内のポート 80 に割り当て( -p 80:80 )します。
$ docker service create --replicas 1 –name web -p 80:80 nginx
f218o6xshkyt7zzxujhnz1a2h 実行後の文字列 f218o6xshkyt7zzxujhnz1a2h はサービス ID と呼ばれるものです。サービス名かサービス ID を使い、サービスの停止・更新・削除などの操作時に使います。
そして、サービスの状況を確認するには docker service ls コマンドを使います。
docker@node-01:~$ docker service ls
ID NAME REPLICAS IMAGE COMMAND
13765buws9fr web 0/1 nginx ここでは REPLICAS (レプリカ)の表示が 0/1 になっているのに注目します。先ほど指定した --replicas 1 とは、タスク(コンテナ)の期待数が 1 でした。しかし、実際には 0 、つまり、まだタスク(としてのコンテナ)が起動しちていない状態です。
この時、スケジューリング処理が行われています。3つのワーカのうち、どこでタスク(としてのコンテナ)を実行するか決め、その後、 nginx イメージのダウンロードと Docker コンテナを起動します。この状態を確認するには docker service tasks <サービス名> コマンドを実行します。
$ docker service tasks web
ID NAME SERVICE IMAGE LAST STATE DESIRED STATE NODE
emjve46lgwjx22o6pxpbetfed web.1 web nginx Running About an hour Running node-02 ここでは node-02 で nginx イメージを使ったコマンドが実行中だと分かります。状況はリアルタイムに変わりますので、 watch コマンドを組みあわせると、状況の監視に便利です(例: watch -n 1 'docker service tasks web' )。
タスク起動後にサービスの一覧を確認したら、今度は 1/1 に切り替わります。
docker@node-01:~$ docker service ls
ID NAME REPLICAS IMAGE COMMAND
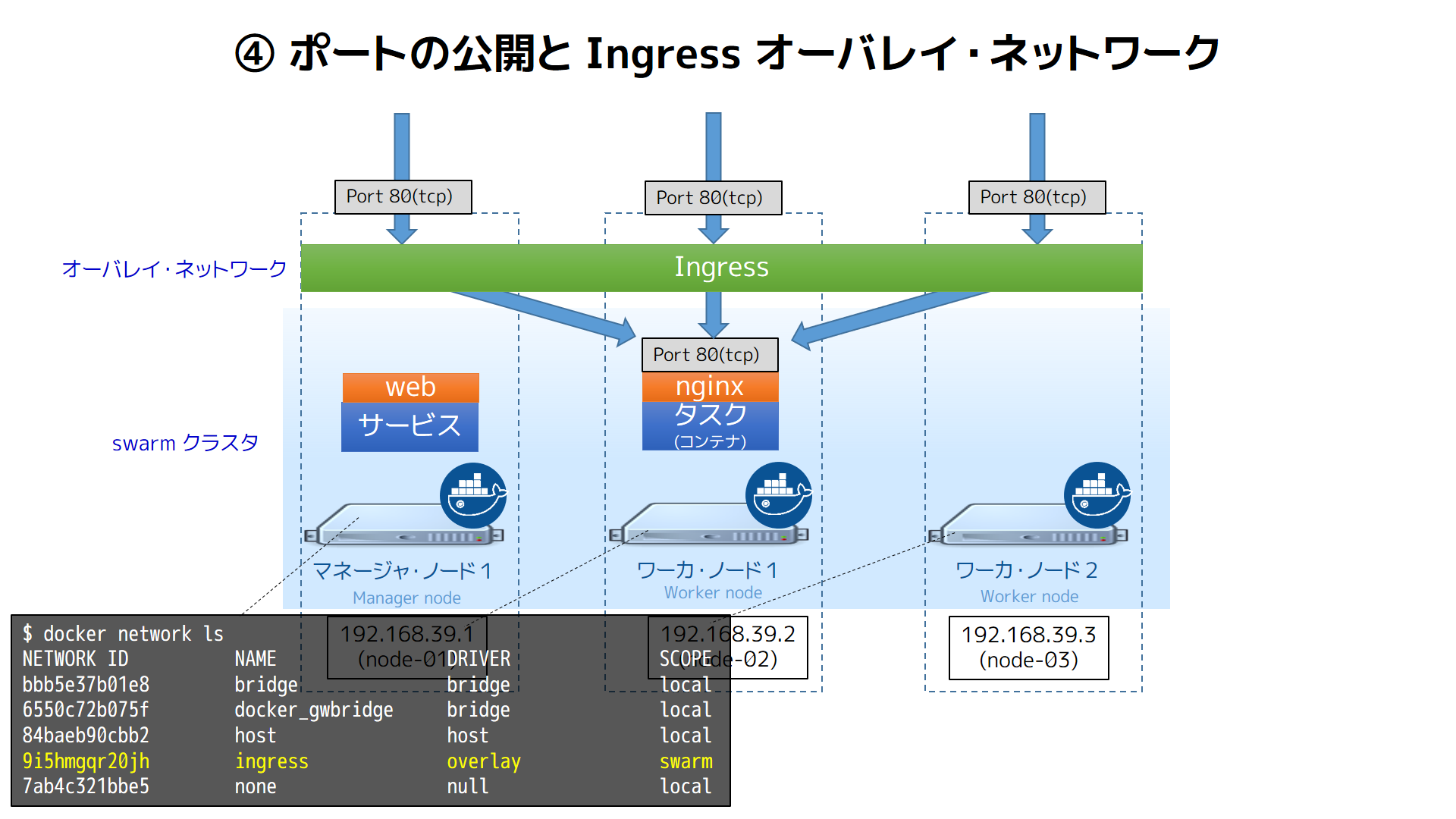
13765buws9fr web 1/1 nginxingress オーバレイ・ネットワークと負荷分散
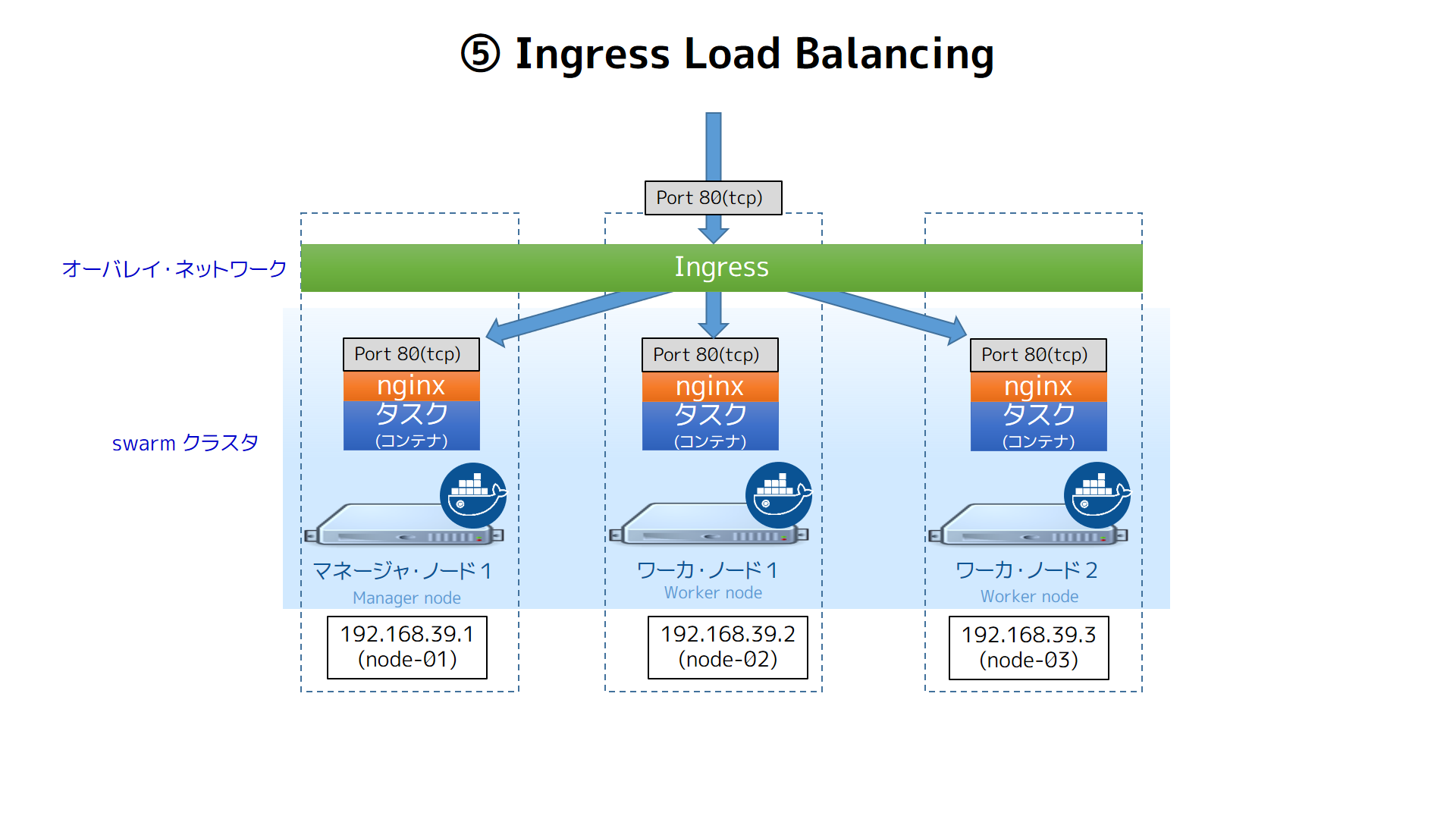
インターネット側など、外部のネットワークからコンテナにアクセスするには、ポート 80 に接続します。接続は、 node-02 の IP アドレス 192.168.39.2 でアクセス可能なだけではありません。swarm モードで動作しているノードであれば、どこからでもアクセス可能です。
これは、各ノード上では ingress という名前のオーバレイ・ネットワーク(overlay network)が作成されているからです。 docker network ls コマンドを実行し、ノード上の Docker ネットワーク一覧を表示します。
$ docker network ls
NETWORK ID NAME DRIVER SCOPE
bbb5e37b01e8 bridge bridge local
6550c72b075f docker_gwbridge bridge local
84baeb90cbb2 host host local
9i5hmgqr20jh ingress overlay swarm
7ab4c321bbe5 none null local 注目すべきは ingress という名前のネットワークです。これは swarm モードで自動作成されるオーバレイ・ネットワークです。これは複数のノード間がつながっている共有ネットワークです。そして SCOPE には local と swam があります。 local はノードの中でのみ有効なネットワーク、 swarm は swarm モードのクラスタで有効なネットワークです。
そして、 ingress ネットワークの特長として、このネットワーク上で公開しているポートは、どのノードへアクセスがあっても、タスクを実行しているノードに自動ルーティングしてくれます。
さらに Ingress ネットワークには負荷分散機能も入っています。この負荷分散はタスクに応じて自動的に処理されます。つまり、swarm モードではサービスとして公開しているポートが分かれば、どのノードにアクセスしても、自動的に対象となるタスク(コンテナ)に到達可能です。内部では自動的にタスクの監視を行うため、スケールアップ・スケールダウンによりコンテナが増減しても、外部から内部の状況を意識する必要がなくなります。
これを応用したら、この Ingress Load Balancing の上にロードバランサやプロキシを置くなり、あるいは DNS ラウンドロビンなどで可用性を高めるサービスが作られるかもしれません。実際には性能面での検証は必要と思われますが、Nginx などリバース・プロキシをたてなくても、良い感じで分散してくれる仕組みは、使いどころがありそうだと感じています。
サービスの更新
次は、サービスの数を3つに増やします。状態を変更するのは docker service update コマンドです。
$ docker service update --replicas 3 web
webサービス一覧を確認したら、期待数が 3 になっているのが分かります。
$ docker service ls
ID NAME REPLICAS IMAGE COMMAND
13765buws9fr web 2/3 nginxタスクの一覧で状況を確認してみます。
$ docker service tasks web
ID NAME SERVICE IMAGE LAST STATE DESIRED STATE NODE
emjve46lgwjx22o6pxpbetfed web.1 web nginx Running 2 hours Running node-02
8owd8swtc99coag9evqz4j0dx web.2 web nginx Running 8 seconds Running node-01
6z7svrkbpjyfp7gme4r1c2qh4 web.3 web nginx Preparing 8 seconds Running node-03 ここでは3台のノードに分散して nginx コンテナを起動しようとしています。 node-01 node-02 は Running (稼働中)と分かりますが、 node-03 は Preparing (準備中)です。そのため、 docker service ls の REPLICAS が 2/3 でした。
もうしばらくしてから docker service ls を実行したら、最終的に3つのタスクが実行中になります。
$ docker service ls
ID NAME REPLICAS IMAGE COMMAND
13765buws9fr web 3/3 nginxなお3つのノードに分散してスケジューリングされたのは、デフォルトでは Spread (スプレッド)というコンテナをノードに分散配置するストラテジが適用されているからです。
次はまたタスクの数を減らしましょう。
$ docker service update --replicas 1 web
web
$ docker service tasks web
ID NAME SERVICE IMAGE LAST STATE DESIRED STATE NODE
6z7svrkbpjyfp7gme4r1c2qh4 web.3 web nginx Running 4 minutes Running node-03 このように、再び docker service update コマンドを実行するだけで、スケールダウンも可能です。
最後にサービスを削除するには docker service rm コマンドを使います。
$ docker service rm web
web
$ docker service ls
ID NAME REPLICAS IMAGE COMMANDこれでサービスの削除完了です。
このように、docker service コマンドでサービスを定義したら、 docker コマンドを使わなくても、swarm クラスタ上でコンテナの起動・更新・停止が可能になります。
なお、この検証を行った Docker 1.12RC2 はリリース候補版のため、実際の Docker 1.12 では仕様が変わる可能性もありますのでご了承ください。現段階では開発中ですが、色々と評価してみる分には、面白いのではないかと思います。
参考
- Swarm mode overview
- Swarm mode key concepts
- Getting started with swarm mode
- Docker 1.12: Now with Built-in Orchestration! | Docker Blog